John Spletzer is an Associate Professor of Computer Science and Engineering at Lehigh University. Below he details the
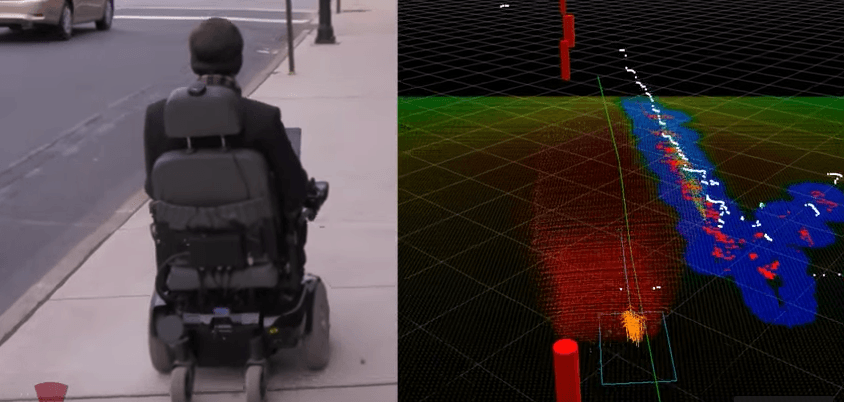
The inspiration for this project came during my sabbatical at Love Park Robotics, LLC (LPR) in 2015. LPR is a robotics startup doing work in industrial perception, and the primary project I worked on was a vision-based pallet detection system for use by Automated Guided Vehicles (AGVs). AGVs are autonomous vehicles operating in warehouse environments. Think “robot forklift,” and you have the right idea. To estimate their position and orientation, AGVs typically rely upon 2D LIDAR (laser scanner) based localization systems that track reflector targets surveyed into the warehouse. The approach is very effective, and can provide sub-centimeter levels of accuracy. However, the process of installing the targets is both time consuming and expensive. Furthermore, it needs to be repeated any time the warehouse is reconfigured. Conversations with Tom Panzarella, CEO of LPR, lead us to investigate an alternative approach. Our hypothesis was that recent advances in 3D LIDAR systems would allow us to estimate AGV pose by tracking natural features already existing in the warehouse. This would eliminate the need for retroreflector targets all together. We refer to this technology as AGV-3D. From my NSF CAREER research, my lab had already demonstrated that a smart wheelchair system using a similar approach could reliably navigate in an urban environment without GPS. You can see an early video from the project here:
In one set of experiments, the wheelchair drove over 12 km autonomously demonstrating decimeter (10 cm) level accuracy in a global coordinate frame by using natural features as landmarks. Our team was confident that we could extend this approach to warehouse environments, and achieve the order of magnitude improvement needed to replace 2D reflector-based systems. However, we needed a specific LIDAR to attack the problem: a Velodyne “Puck” VLP-16 3D LIDAR. Velodyne is arguably the most respected name in LIDAR systems. Their products are used on almost all autonomous automobile prototypes, but they aren’t cheap. Even the lowest end Puck model costs $8K. Fortunately, a FIG award in June 2015 provided the necessary funds to both procure a Puck, and support a graduate student for one semester to obtain preliminary results. These results were presented by then research assistant (now Dr.) Dylan Schwesinger in Aug 2016 at IEEE CASE. A video of the proof-of-concept system in action can be viewed here:
More significantly, Lehigh and LPR were awarded a grant by the National Science Foundation (NSF) in April 2016 to develop a prototype of AGV-3D. This was less than 1 year after receiving the FIG award.
More recently, our team also received significant development funding from a private company interested in licensing the technology. Leveraging this additional support to accelerate development, we intend to have a production-ready version of AGV-3D by the end of 2017. It is fair to say that this chain of events would never had happened without the FIG funding, and we are grateful for the support.